previous next
previous next 
PROJECT BAR-B-Q 2019
| home previous next |
|
| The Twenty-fourth Annual Interactive Audio Conference PROJECT BAR-B-Q 2019 |
 |
Group Report: |
| Participants: A.K.A. "Committee on Haptic Augmented MIDI Peripherals (CHAMP)" | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Karen Collins, University of Waterloo | Brad Lambert, Cirrus Logic | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Joshua McMahon, Realtek Semiconductor | Iroro Orife, Netflix | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Dafydd Roche, Dialog Semiconductor | Kate Stone, Novalia | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| SPECIAL CONSULTANT: Rick Cohen | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Brief statement of the problem(s) on which the group worked: Haptic devices are increasingly used around the world, and are present in game controllers, mobiles, wearables, force feedback devices, etc. Haptic devices are currently not being used in areas of media where they could be used--for instance, to add physical sensation to music and movie content: Outside the West, the #1 way to experience Netflix content is streaming to mobile device, and a way to play back haptic content in the future will be useful. Today, content creation for VR, games, etc. has a different build for different haptic devices (e.g. phone, Switch, Xbox, etc) and is tightly coupled to hardware. At the moment, there are many companies designing proprietary solutions to the use of haptic devices, but these are not designed for cross-platform implementation. As such, someone designing a game for Switch has to re-design the haptic aspect for phone implementation, etc. A recent attempt to standardize development for VR and AR, called OpenXR was released this year. However, the specification is specific to vibratory devices, is designed for use with game engines only, and relies on code, making it more difficult for novices to programming, (like many sound designers, for instance) to develop haptic content. We’ve seen this problem of cross compatibility between devices before, with audio hardware: the response of the audio industry that still holds today was MIDI: Musical Instrument Digital Interface. Some of the challenges we want to address directly are:
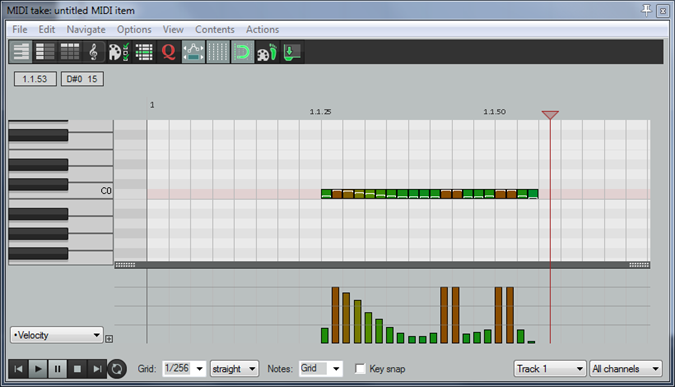
MIDI has been used before in the creation of haptic content. Project BBQer Peter “pdx” Drescher, for instance, used MIDI for the creation of haptic vibration on the T-Mobile Sidekick (c. 2002). Ringtones on the phone used MIDI for music, haptic vibration and LED lights. The use of MIDI then is already a tried-and-tested way to distribute haptic information. What we need next is to standardize the use of MIDI for haptics. A brief statement regarding the group’s solutions to those problems, or a statement describing the progress that was made if no solution was determined: Our solution is to adopt and adapt the MIDI protocol for haptic devices. When considering most media playback/interactions systems (e.g. iOS, Linux, Android, Windows etc) all of them have the capability to create, encode, decode and render midi in some manner or another. Many of the content creation tools (e.g. Unity, Unreal Engine, Adobe Premier, Final Cut Pro, Ableton, Cubase etc) all have basic MIDI creation capabilities. The image below shows how Reaper’s MIDI editor was able to create the envelope for a vibro-haptic event, happening on Left Hand Thumb. It is possible, in other words, to use existing software to develop haptic MIDI content.
Audio is similar to haptics in many ways, and there are mappings that we can employ like pitch = frequency that make sense and reduces the learning curve for content creators. We want to develop a standard mapping system for haptics that allows basic tools that users already have for the creation and editing of MIDI to edit and create advanced HD haptics in the media that we consume. This report is not a complete specification, it is the early work and examples of how haptics could be mapped to MIDI, using Vibrohaptics transducers and their drivers as an example. We hope to garner interest in order to expand the initial prototypes and specification. Use Cases We imagined a handful of use cases to demonstrate the creation and rendering flow: Use Case #1 Commuter on a train
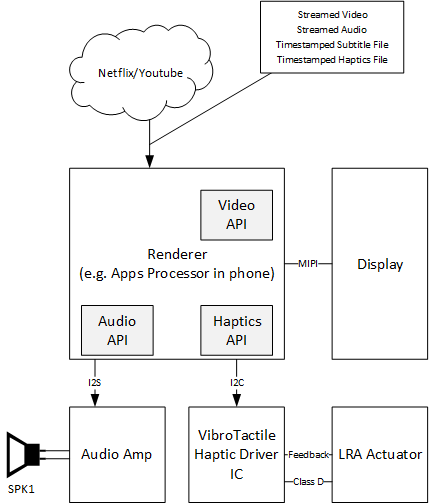
A commuter on a train is watching a movie on their smartphone. From the media source perspective (e.g. Youtube, Netflix etc), the MIDI file is provided to the client (the mobile phone) along with the subtitle file as part of the MPEG media package. The movie is then streamed in real time. The haptic track has been created in advance by the movie company, by the media provider (e.g. Netflix) or by a third-party (e.g. fans). Standard MIDI files are time stamped, which allows the content to be compatible with the usual fast-forward/rewind controls. Content is created and authored by professionals in video or audio editing tools that already support MIDI. Custom MIDI “Instruments” could be created to support specific haptics effects. Such simple tools and open access to a standard would even allow the likes of Youtube content creators to add a timestamped “haptics file” to be downloaded before the video begins streaming and allow reliable time-synchronized haptics to be played along with streamed content. The haptics file is in this way analogous to a subtitle file, which are often created and swapped by fans. Such similarity in container and behavior to a subtitle file makes the rollout of Haptics in existing streaming services very easy. The playback app (e.g. Netflix app on an iPhone) would be responsible for the translation/rendering between the timestamped midi-file and the iOS/Android Haptics API. Use Case #2 Gaming and VR
Gaming and VR have some special needs. Content creation is typically done in custom tools like Unity and Unreal Engine, with specific sound design and effects being created in tools such as Pro Tools, and then integrated into the engine using middleware tools like WWise. Sound designers arent necessarily haptics experts, but ARE being asked to create haptics effects to match audio effects. (e.g. gunshots, car crashes, Interactive switches, etc). Game/VR developers are expected to port the media to as many different systems as possible - XBOX, Playstation, Nintendo, Mobile, VR as possible. This is done regularly, porting the visual and audio assets from platform to platform, however, the haptics is typically done for specific hardware. For example:
OpenXR offers cross-platform deployment for common VR and gaming engines, but not mobile or future devices. AAA Games will be expected to be very dynamic in their haptics effects, with envelopes being generated and modified in real time as effects are mixed. For Vibrotactile experiences, this would most likely be either be Mode 0 (Streamed Envelope) or Mode 2 (hifi) (see below for explanation of these modes). However, shorter, simpler “apps store” style games will likely use pre-canned haptics sequences that matches a standard sound effect - think of Super Mario’s Jump sound effect from the 80s. It was the same sound effect, regardless of surface he was jumping on. For quick game development, a standard jump “feel” could be repeated again and again. This would equate to Mode1 in our VibroTactile mode (see below for explanation of these modes).. Custom made unique haptics effects could also then be bought and licensed for use in games in the way that sound effects are currently sold as part of sound effect libraries. Use Case #3 Medical Simulation/Training
This content is very similar to the VR/Gaming in their real time creation and rendering, however, the hardware is tightly specialized and coupled to the media. (e.g. surgery simulation etc). Under these conditions, multiple haptics transducers are used, and specific knowledge of the hardware is used. Systems would likely stream the haptics to the transducer using a PCM Audio stream. Use Case #4 Wearables
The main focus for wearables is lower power consumption, which tends to lend itself as few commands as possible (to minimize the MCU ON time). Such applications fit sample based effects well (e.g. different haptic events for different alerts - e.g. one type of haptic to turn left another to turn right or text from my daughter vs. email from work.) On the Vibrotactile side, this is best taken care of by Mode 1 - Sample playback. On the creation side, this is best handled either by a DAW (Digital Audio Workstation) or a simple midi-editor. Use Case #5 Remote Physical Long Distance Link
While seemingly humorous at first glance, the possibility of remote physical links is an interesting one. It is our belief that beyond gaming, adult content is a strong driver of technological innovation in haptics. Beyond the purely sexual, physical long-distance touch is an intriguing use of haptics. In a Kotaku post (https://kotaku.com/long-distance-relationships-suck-but-vrs-made-it-easie-1775615168) writer Nathan Grayson wrote a fascinating article about the power of VR to provide closeness in an interaction with a loved one: We held hands. We hugged a couple times. It was just really nice, despite the lack of so much as a controller rumble when we touched. That article was written in 2016, but even then, the lack of haptics technology was noticeable. Haptics has a true potential to make such interactions much closer, using VibroTactile (touching someone's arm), Thermal (warmth of other users hand), Skin Stretch (a hug) etc. On the vibrotactile side, such content wouldn’t be expected to be repeated and would likely be dynamically authored and streamed (potentially from one client to another). The low bandwidth nature of MIDI would be an excellent method to transmit from one user on one side of the planet to another, and allow the receiver rendering device to downmix to whichever transducers were in the receiver. On the content creation side, this was probably one of the most complex use cases as individual interactive objects would require their own characteristics to be created. (e.g. playing piano for your partner - force, temperature, texture of the key’s alone would require significant authoring skills - likely custom tools would be required within Unity etc). This topic also introduced the concept that differing human gender may require different actuators, placed differently, with different capabilities. Not every human being is the same. That could be addressed by allocating a specific number of NOTES to “unallocated body location #” and using MIDI’s SysEx commands to name the actuator positions for the renderer, which would then allocate the haptics signals as required for the user (e.g. user may be wearing a female haptics suit, where and what transducers should be actuated). We anticipate leaving blank a number of possible body locations in our specification for either expansion of existing content or personalized touch locations. Proposed Solution In each of the use cases above, there is a Media Renderer (e.g. Apps processor in a mobile phone). Haptics Transducers or Driver ICs are expected to be connected to the the Apps processor.
In existing media creation and playback (e.g. making a game that has to work on Switch, Oculus and iOS) haptics content needs to be created separately for each end equipment. The content creator must know how to directly control the end equipments Haptic actuator API. This has future implications for newer hardware that has more/different haptics actuators and drivers. We propose that the creative tools are being used without knowledge of the end equipment. it should only care about the actual body positions and haptic effects known to date. The content renderer is then responsible for “downmixing” the content down to the number of transducers that the device has. This is very similar to Dolby Atmos’ Object-Based Audio rendering scheme, where the rendered has individual sound objects and 3D data that the renderer uses to render to a stereo headphone mix, a stereo living room mix, 5.1 surround, 7.1 surround etc. For example, the MIDI-Haptic file may call for the vibrotactile content on each of the 10 fingers to be actuated, but the Renderer (e.g. smartphone) may only have one haptic driver. It is then the role of the renderer to process and mix together the appropriate fingertip data into the single haptic driver API available in the Operating system. This creates backwards and forwards compatibility for everything from a single Vibrotactic ERM vibration motor through to a multi-haptic-type-transducer haptics suit! Parameters Multiple parameters needs to be mapped into the MIDI space. The first thing to explore is the number of options per parameter, the number of parameters, and the potential for expansion into the future. Each transducer type will also need to have different parameters passed to it (that is, a Peltier element has different configuration parameters than a Vibrotactile actuator). Different kinds of Haptics senses/transducers There are 7 kinds of haptics senses that can be used at the time of publication. The spec needs to address these types of Haptics senses. We leave one open for user-defined option. Transducer type is set by writing to the MIDI Continuous Controller (sometimes also called Control Change) message CC14. CC14 can be set per channel, allowing multiple channels to be used for the same kind of transducer, with other different configurations.
Each of the senses/transducers require a different set of parameters. For example, Vibration transducers (ERM, LRA, Piezo) require amplitude, time, frequency of vibration (for off resonant drive). Locations of the Body Multiple positions on the body need to be accounted for, and some must be left for custom content. This then potentially gets multiplied by the TYPE of transducers. The team looked at and discussed the various individual parts of the human body and how many transducers might be required. Body location is set using the NOTE on a piano roll. e.g. Left hand Thumb may be C0, Left Hand Index C#0 etc. Using the entire music note selector in MIDI, we have 128 options, which is more than the existing haptic suits on the market (usually 80-88 for the entire body). Any additional beyond 128 can be set using SysEx commands (to be defined), or by using a second transducer type channel, assuming it isnt being used. Actual mapping to be determined.
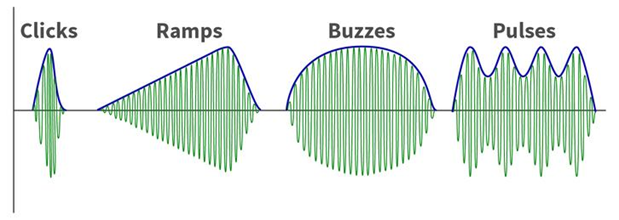
Modes of operation: Each transducer shall have multiple different modes of operation that maps the MIDI data presented into different decoding. Mode of operation is set on CC15, allowing a different mode of operation for channel. As multiple channels can use the same transducer type, it allows some transducers to be in one mode, whilst others are in another. For example, Ch0 could have Vibrotactile that are simple streamed envelope haptics (running at resonant frequency) while Ch1 could be in Triggered Patterns, where the stored sample is a heartbeat effect that gets played repeatedly to build tension. Modes of operation for all the different transducer types are open for continued work. For the sake of example, Vibrotactile modes of operation are below. They are based on existing smartphone/gaming/VR Haptic Driver IC Technology (DA7280) Example: VibroHaptic Modes of operation We envisage 3 basic modes of operation: These are dependent on the level of detail required (i.e. fidelity) and dynamic versus “baked” content.
Mapping of Music MIDI to VibroHaptic MIDI Initially our feeling was to use channel, instrument, note, and velocity. This will not account for all use cases. As such, we switched to using Control Change Messages to set parameters such as frequency. Initially, we set the transducer type statically in the spec (e.g. Ch0 is always Vibro Tactile, Ch1 is Thermal) - however, that limits the amount of parallel transducers (e.g. haptics suit with 100+ Vibro-Haptics transducers, 16 of them could be played simultaneously with different Mode of operations).
Examples in Hex code in hex code: https://people.carleton.edu/~jellinge/m108f13/pages/04/04StandardMIDIFiles.html Example: Haptic Headshot
Example: Thermal Hot Then Cold
Items from the brainstorming lists that the group thought were worth reporting: Product safety
Future Items required before bringing to a Spec group
Glossary ERM - Eccentric Rotating Mass Web Resources of use MIDI driving LEDs, being controlled in Logic https://www.youtube.com/watch?v=AYx55nj5vSo https://www.nap.edu/read/4761/chapter/8#175 https://www.midi.org/articles-old/details-about-midi-2-0-midi-ci-profiles-and-property-exchange https://www.soundonsound.com/reviews/sonalog-gypsy-midi List of Midi Continuous Controllers (and how they are typically mapped): http://www.nortonmusic.com/midi_cc.html The essentials of the midi protocol Incomplete Specification In-Work Use of special terms: This document adopts Section 13.1 of the IEEE Standards Style Manual, which dictates use of the words “shall”, “should”, “may”, and “can” in the development of documentation, as follows:
Protocol This body of work is based on the protocol work done in MIDI 1.0. Standards documents are available from http://www.midi.org High Level Overview (Informative)
Body Location List Being worked on in a separate document until complete Vibrotactile Transducers (CC14: 0x00) Vibration Haptic Transducer, that covers ERM, LRA, Piezo and other Vibration. These transducers are either DC or AC wave driven. ERM’s are DC (with a PWM’d amplitude) or LRA (use on-resonance tracking or off-resonance tracking). Transducer type needn’t be specified by the media creator. It is the role of the Hardware Vendor to decide for these signals should be best converted for the transducers they have.
MOO 0x00 Envelope Streaming This mode of operation uses the NOTE Parameter to describe the location on the body and uses the VELOCITY Parameter to transmit updates to the current amplitude. Timing information is at the discretion of the renderer. CC16 is used to transmit the AC frequency mode, if it’s supported by the transducer.. See below for details. Most AC driven transducers still have an extremely resonant frequency response. This is best tracked locally using local hardware (such as DA7280 LRA driver IC’s).
MOO 0x01 Triggered Sequences This mode of operation uses the NOTE Parameter to describe the location on the body and uses the VELOCITY Parameter to tell the rendering device with pre-downloaded sequence to playback. Pre-Programmed sequences can either be downloaded before playback (e.g. at start of media, playback, game level etc) or during run time. CC7 is used to scale the sequence amplitude between 0 and 100%. CC16 is used to transmit the AC frequency mode, if it’s supported by the transducer.. See below for details. Most AC driven transducers still have an extremely resonant frequency response. This is best tracked locally using local hardware (such as DA7280 LRA driver IC’s).
Alternatively, some developers may choose to run the LRA in an open-loop “off resonance” mode, where the frequency is fixed and updated by the content creator. This is mostly done for interesting audio effects from the LRA,in systems where you may not have an audio loudspeaker (for example, a gaming controller). NOTE: A method to transmit samples needs to be added to this section.
MOO 0x02 HiFi VibroHaptics Advanced users of haptics may prefer to use an additional audio track as their absolute, or envelope signal. This mode is set up to simply say “Haptics Data for Body Location X can be found on Audio Track Y, in Absolute or Envelope form” Absolute simply means data should be treated in a blind-passthrough manner. A DAC to a Class D, to the actuator. Envelope more will simply be resonance below a fast moving envelope. Note and Velocity refer to the body position and the audio channel to use.
Thermal Transducers (CC14: 0x01) Thermal transducers may be something as simple as a Peltier element with a closed loop controller attached to it. Media authors needn’t concern themselves with the method of control. The end system could either be open-loop (calibrated) or closed loop. MOO 0x00 Direct Temp NOTE ON signals will set the transducer to a fixed temp and hold. NOTE OFF will disconnect drive signal and allow the transducer to come to equilibrium with the user (skin temperature?)
Visual LED Transducers (CC14: 0x02) LEDs may not be haptic as such, but the ability to light up specific parts of the body along with vibration could be very useful (e.g. showing a user playing an Augmented Reality game where they were hit, along with the vibration!) MOO 0x00 HSV Mode NOTE ON signals will set the transducer to a fixed temp and hold. NOTE OFF will disconnect drive signal and allow the transducer to come to equilibrium with the user (skin temperature?)
Electrical Stimulation Transducers (CC14: 0x03) TBD MOO 0x00 HSV Mode TBD
Appendix A: Document Templates TEMPLATE: HAP-TYPES and MOOs HAP-TYPE NAME [Insert Description of the Haptics Actuator] - .e.g Vibration Haptic Transducer, that covers ERM, LRA, Piezo and other Vibration. MOO 0x00 NAME [Insert Description of the AIM of this MOO]
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Copyright 2000-2019, Fat Labs, Inc., ALL RIGHTS RESERVED |